Hi,
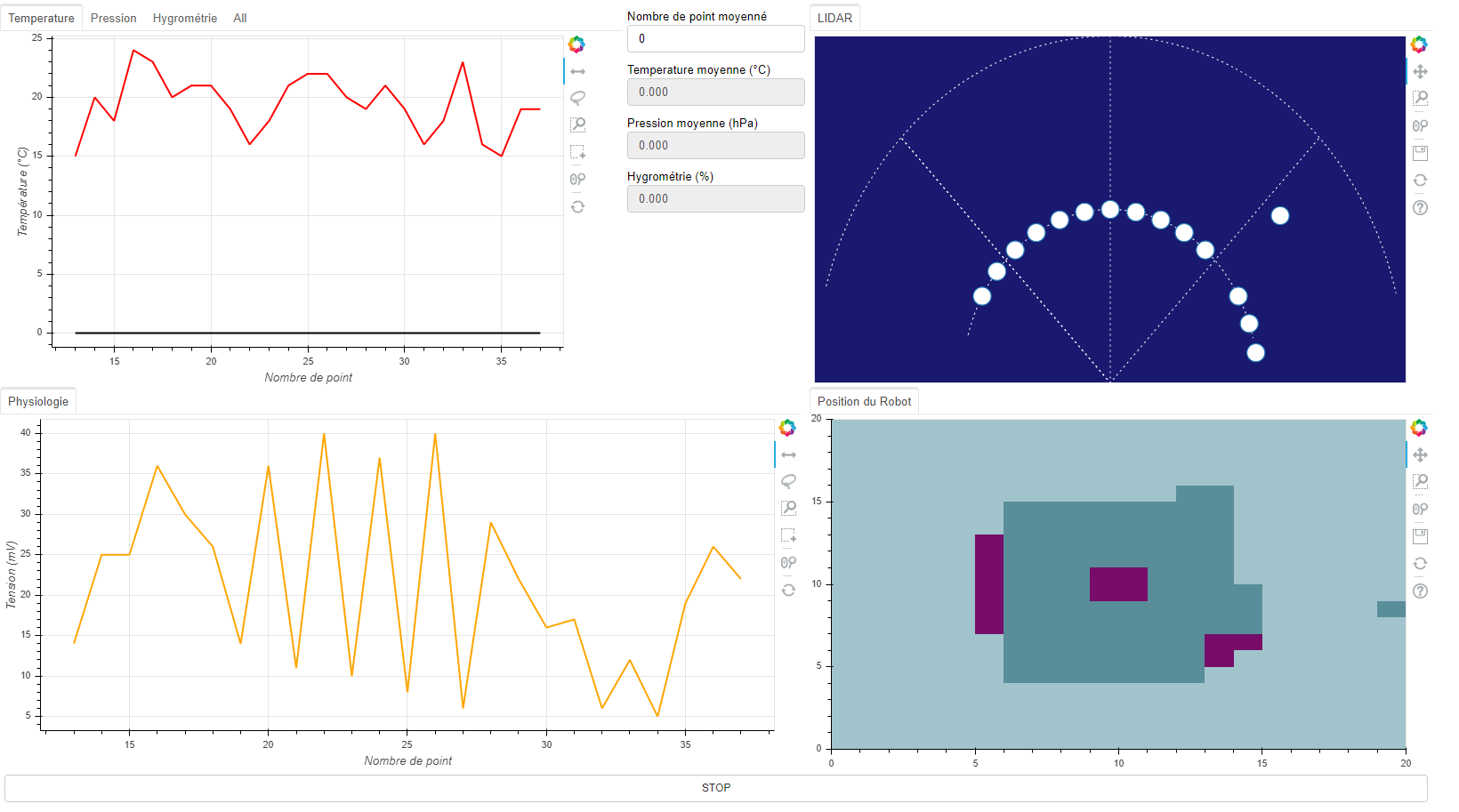
For a school project I had to develop a human machine interface for a robot that gives us the temperature, pressure, control and a physiological signal. Also on a lidar on the robot which allows us to detect obstacles and its position on a map of 2 meters by 2. I was helped a lot during my development (I posted by far from 5 topics) therefore I find it a fair return to show you what I have achieved.
this is the code :